|
|
||
|
|
Auto Ant Build Report
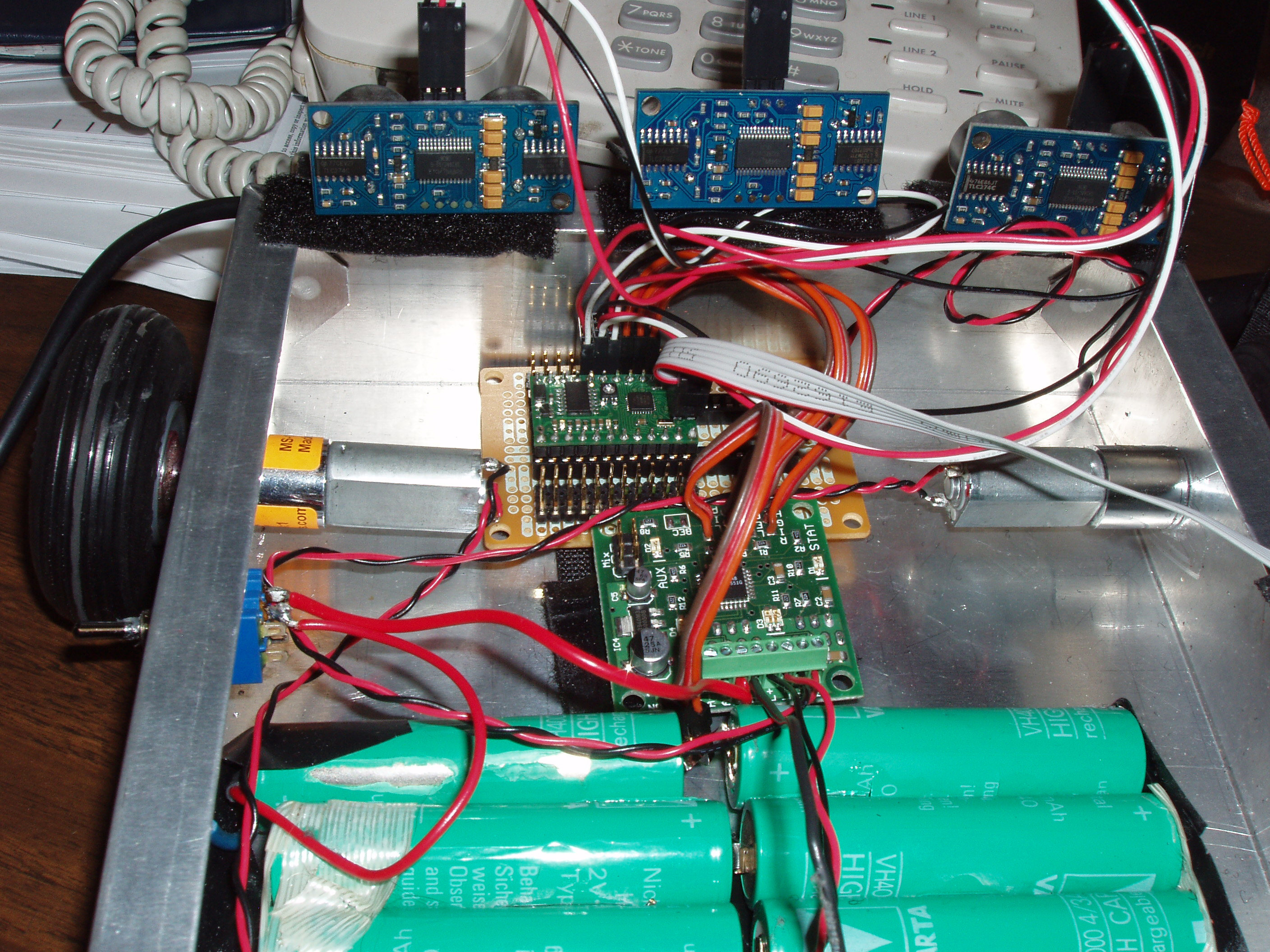
Back To MainAs of February 6, 2008Looking at building an Auto Ant. The first question in my mind is "What microcontroller to use". The choices I have come up with are: PIC16F876A, MSP430, or the Orangutan Jr. as suggested by Steve Judd. I normally use the PIC in one flavor or another and programming it using MBASIC from Basic Micro. I purchased the Standard Edition several years ago and wish I had purchased the Advanced Edition because the stuff I need like SERVO, HPWM and ADC are not supported in the Standard Edition. Instead, I have to work around it writing my own sub routines writing to the registers directly which is a pain. I bought an MSP430 programmer along with a 3 board package deal. Cheap and I already use Code Composer to program TI's DSPs so I figured it might be an easy transition. I received the hardware and tried getting it to work.< The first problem I had was that the software (IAR) would not recognize the programmer to even install the drivers!!!! I emailed the tech support department and I would get 1 response a day that asked me to check things I already checked and said as much in my email to them. I figure they are working on a script and not really reading the email. In the meantime I posted on the forum and got some good feedback about the Orangutan. I ordered it while waiting for the TI issue to get settled. I received the OR. JR. and within a day was able to write code to it. (I thank Steve Judd for his direction on this. HIS customer service rocked compared to TI's and I mentioned as much to TI. They were a little more responsive. We set up a time for a phone support and during the phone support he had my try the same things......Finally convinced him I know what I'm talking about and I received an RMA for the programmer. I sent it in and my replacement is on backorder. I created a test platform containing the OR. Jr. (see above picture) with which to begin testing. Once I know how to control everything will then look to actually make the robot. In the meantime I started working on programming the servo controls in the OR. Jr. to run a Scorpion HX. I got that working great in no time!!!! Next step is to get the Parallax PING))) sensors reading distances. I have three hooked up in hopes to see transition from right to left or left to right. This one is a bigger challenge. I posted on the Pololu forum and received some good help. Using pin specific interrupts I can take a timer reading at the beginning when transitioning the pin from the initial ping of high to low and then wait for the next interrupt when the pin goes high when it gets a response and take another timer reading. Assuming I am not running any other interrupts or code at the time, the timing should be consistent and I should be able to determine a somewhat accurate distance. The problem is when I was updating code something happened and it will no longer go into programming mode. After researching the o so helpful forum I find several people claim similar problems. What have I gotten myself into? I currently have an RMA to return the OR. Jr. for a replacement but I fear what I do not understand and that is why the thing just quit the way it did. However, still have a hard time programming the PIC advanced stuff, and still haven't received the replacement MSP programmer from TI. So I think unless I want to spend several hundred dollars on MBASIC Advanced, my best bet right now is to wait for the OR. Jr. replacement and see if it happens again.
|

